Autonomi:

Hva skjer i selvkjørende bilers verden?
Endringene i bilverdenen er enorme – og det er mer på vei. Vi begynner å omfavne elektrisk kraft og å stole på avanserte førerassistentsystemer (ADAS), men hva med fremtiden? Neste trinn er å erstatte sjåføren, først bare under visse omstendigheter, og deretter fullstendig. Dette er en enorm teknisk utfordring som i stor grad vil være avhengig av maskinlæring (ML), men det er også en rekke dype sosiale problemstillinger.
Med utgangspunkt i en NHTSA-rapport som tilskriver mer enn
90 % av alle trafikkulykker til sjåføren, er trafikksikkerhetsorganisasjoner
opptatt av å se dette skje raskt, da de tror av selvkjøring vil drastisk
redusere antallet dødsulykker i trafikken. Først vil selvkjørende biler dele
veien med menneskestyrte biler, men på sikt vil alle kjøretøy være selvkjørende
og avhenge av sensorer og kommunikasjon mellom kjøretøy for å ta gode
beslutninger. Denne V2V-kommunikasjonen (mellom kjøretøy) vil være banebrytende
– den gir ikke bare kjøretøyet muligheten til å kommunisere sine intensjoner og
advarsler, men også å dele sine erfaringer for å sikre et tryggere kjøremiljø.
Mengden data som samles inn som et resultat av denne kommunikasjonen er nesten utenfor fatteevne. Tesla har allerede begynt å samle data for å støtte den pågående utviklingen av deres autonome systemer. Storskala innsamling av data fører imidlertid til flere (og så langt ubesvarte) spørsmål knyttet til personvern, samtykke og myndighet til å behandle.
Utvikling av kjøreintelligens
Ulykker med selvkjørende kjøretøy er ganske sjeldne, noe som er godt nytt for trafikanter, men utgjør en utfordring for dataforskere som trenger data for å se hvordan de oppstår slik at selvkjørende kjøretøy kan forutse og unngå dem. Forskere ved Saarland University i Tyskland har brukt simuleringer for å trene opp ML-systemene, og har utviklet en tilnærming som fungerer uten å skape noen faktiske ulykker. Deres simuleringsbaserte opplæring presenterer realistiske ulykkesscenarier og andre hendelser som autonome kjøresystemer kan håndtere.
Ettersom kjøretøy blir helt avhengige av sensorene sine, blir det stadig viktigere for dem å identifisere en eller flere feil og deretter håndtere situasjonen (enten ved å fortsette i «kjør rolig hjem»-modus eller stoppe kjøretøyet).
Ved å registrere data fra den virkelige verden som er abstrahert til et nivå der de er anonymisert, kan læringen utvikle seg raskere og samtidig oppfylle behovet for personvern. Imidlertid vil et tydelig juridisk rammeverk og en avtale mellom sjåfører og bilprodusenter fortsatt være en forutsetning.
Endre oppfatninger
Veien til selvkjørende kjøretøy startet med ADAS, hvor kjøretøyet begynte å kontrollere seg selv – et viktig skritt mot autonomi på veien. Selv om noen er bekymret for personvern og påliteligheten til teknologien, er det langt flere som er bekymret for veier fulle av selvkjørende kjøretøy.
Utfordringene knyttet til det skiftende billandskapet er langt fra utelukkende tekniske. Måten vi bruker, og til og med eier, kjøretøy på vil endre seg. Kjøretøy er dyre – og med mer teknologi og større batterier, stiger prisene – samtidig står de ofte mer stille enn de er i bruk.
Nye transportkonsepter som mobilitet som en tjeneste (MaaS) lover å fjerne behovet for private kjøretøy. Autonome kjøretøy fører faktisk til flere viktige spørsmål når det gjelder eierskap og drift av disse kjøretøyene i fremtiden.
Intelligent kjøretøyatferd
At biler kan kommunisere med hverandre og miljøet rundt seg vil gi mange fordeler. Dette inkluderer forbedret sikkerhet, redusert trafikk, og mindre forurensning gjennom varsling om midlertidige problemer eller hindringer, slik at alternative ruter søkes.
De fleste sjåfører viser god veietikette og tilpasser atferden etter kjøreforhold og lokasjon, enten det er urbant eller i tettbebygde strøk. Nevrale nettverk kan enkelt fastslå data som posisjon, hastighet og kjøreretning, men sliter med å forutse det neste som kan skje. Menneskelige sjåfører vet at det i situasjoner som bykjøring er nødvendig å ta kalkulerte risikoer.
Noen menneskelige sjåfører er høflige, men veietikette kan variere basert på lokasjon eller nasjonalitet. Av den grunn må selvkjørende biler vurdere situasjonen og kjøre deretter.
Viktige steg mot autonomi
I mange år har bilprodusenter samt nasjonale og internasjonale veisikkerhetsorganisasjoner jobbet hardt for å realisere autonome kjøretøy. Dersom utfordringene bare var tekniske, ville vi mest sannsynlig vært i mål nå. Det å fjerne menneskelige sjåfører fører imidlertid til juridiske utfordringer for forsikringsselskapene, og legger mer ansvar på utviklerne av algoritmene og ikke minst kjøretøyprodusenten. Slike problemer, i tillegg til samfunnets bekymringer for store endringer, hemmer fremgangen. Likevel må vi løse alle disse utfordringene ettersom veiene blir stadig mer overfylte og det er ugjendrivelige bevis på at mennesker forårsaker de fleste ulykker.

SAE International, tidligere kjent som Society of Automotive Engineers, har definer seks nivåer av autonomi for kjøretøy (Figur 3), som er ment å være et rammeverk for utviklerne av autonome kjøresystemer. De tre første nivåene, Nivå 0 (midlertidig assistanse) til Nivå 2 (kollaborativ og integrert støtte), eksisterer allerede i mange ADAS-systemer som varsler eller hjelper menneskelige sjåfører. Noen eksempler er adaptiv cruisekontroll (ACC), blindsonedeteksjon, filtskiftevarsler og filholder, adaptive lys, nødbrems, skiltleser og mer. Antallet installerte ADAS-funksjonaliteter er avhengig av modellen og tilleggsfunksjoner som er påkostet ved kjøp. Opp til SAE Nivå 2 er sjåføren ansvarlig for all kontroll av kjøretøyet, selv om noen av ADAS funksjonene ser ut til å tilby semi-autonomi.

Videre opp mot nivå 3, er ADAS-funksjonene integrerte og i stand til å samarbeide, men sjåføren har fortsatt kommandoen. Dette betyr at de må følge med, passe seg for mulige farer og være klar for å overta full kontroll ved behov.
ADAS til autonomi
Fra nivå 3 antas det at autonom kjøring vil oppstå. På nivå 3 kan systemet «falle tilbake» på sjåføren ettersom det kan be sjåføren om å ta kontroll. Videre på nivå 4 og nivå 5 er det ingen behov for en menneskelig sjåfør, og ofte er det ingen pedaler eller ratt. Mens nivå 4 tilbyr autonomi i noen situasjoner (f.eks. kjøring på motorvei), er kjøretøy på nivå 5 fullstendig autonome under alle forhold.
Å komme seg videre fra Nivå 3 krever imidlertid store teknologiske forbedringer i tillegg til flere kommunikasjonsstandarder og bedre infrastruktur. Ikke minst må også kjøretøyprodusentene samarbeide. Det er tegn på progresjon: Mercedes-Benz har nå et førerpilot-system på nivå 3 i deres nye S-klasse som kan bli brukt på over 13 000 km med tyske veier med hastigheter på opptil 60 km/t.
Viktigheten av sensorer for autonom kjøring
For at et kjøretøy skal kunne navigere og kjøre selv, må den minst være like observant på omgivelsene som en menneskelig sjåfør ville vært; ellers er det rett og slett ikke gjennomførbart. For å kunne «se», brukes informasjon fra sensorene til å detektere objekter og deres posisjon i forhold til kjøretøyet, samt deres fart og bane. I tillegg må algoritmene prosessere disse dataene for å avgjøre om objektet er en annen bil, et trafikkskilt, en fotgjenger eller noe annet. Mens ADAS-systemer har noen av disse evnene, er det behov for mer sofistikerte sensorer og prosessering før full autonomi kan oppnås.
Autonome kjøretøy har flere sensorer og deteksjonssystemer (Figur 4), inkludert radar, LiDAR og video for å finne ut om veien foran er fri for hindringer. Disse systemene tar også beslutninger når ulykker er uunngåelige, og potensielt kan føre til skader. Å gi ansvar for menneskeliv til nevrale nettverk er imidlertid et komplisert juridisk minefelt. Selv om denne teknologien vil gjøre veiene tryggere og redde liv ved å følge et menneskebestemt sikkerhetsrammeverk, har ideen om å la algoritmer ta slike avgjørelser skapt stor bekymring blant mange mennesker.
Radar finnes i flere ADAS-funksjoner, inkludert automatisk nødbrems (AEB), og adaptiv cruisekontroll (ACC), og kan brukes til automatisk parkering, filskifte på motorvei og i saktegående trafikk. Moderne radar opererer med bølgelengder på millimeternivå (mmWave), med en frekvens på rundt 77 GHz. Radarer er pålitelige og er raske på å detektere avstand og fart til objekter uavhengig av været.
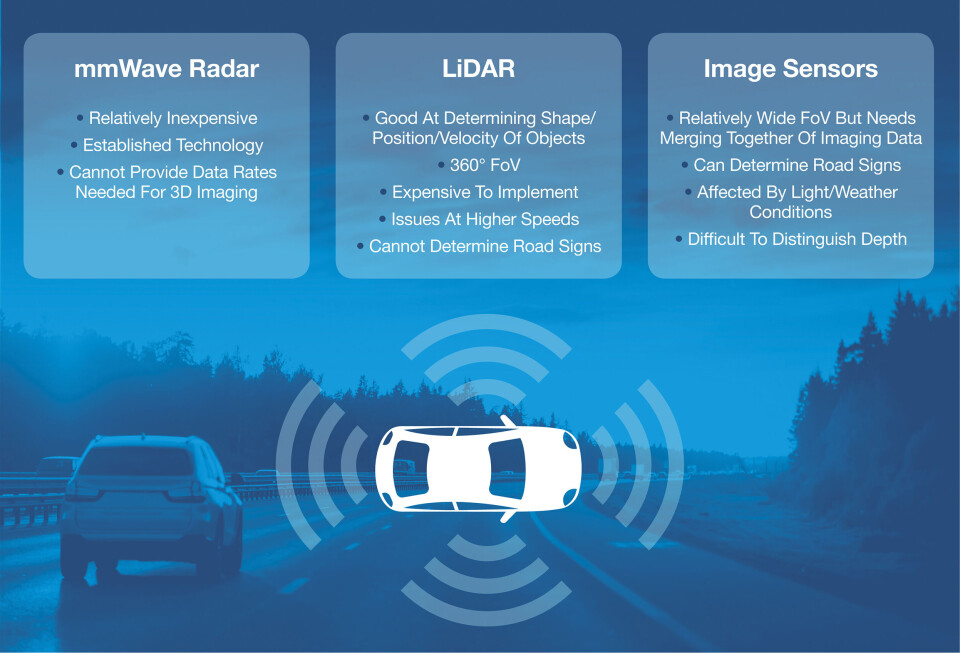
LiDAR kan bli sett på som en form for laserlysbasert radar som er i stand til å 3D-skanne for å lage et virtuelt kart over miljøet rundt kjøretøyet. I praksis er LiDAR komplementær til radar, og hver av teknologiene passer til spesifikke bruksområder.
Samtidig som LiDAR og radar er svært gode når de blir brukt sammen, er det enkelte oppgaver som krever bildeanalyse (for eksempel er HD-kameraer nødvendig for å gjenkjenne trafikkskilt). Ved å plassere flere vidvinkelkameraer rundt kjøretøyet, skaper man en 360-graders sanntidsvisning som eliminerer blindsoner. Kombinerer man denne visningen med LiDAR og radar, gir det en svært omfattende bevissthet om omgivelsene, som vil gjøre det mulig for kjøretøy å bevege seg inn i de høyere nivåene av SAE-modellen.
Dataintelligens støtter sansene
Samtidig som moderne sensorer kan tilby et bra bilde av de umiddelbare omgivelsene, kan det bli enda bedre med informasjon fra andre kjøretøy i nærheten samt intelligent infrastruktur. Disse trådløse systemene er kjent som kjøretøy-til-kjøretøy (V2V) og kjøretøy-til-infrastruktur (V2I). Begge er avhengig av samtidige høyhastighets dataoverføringer med lav forsinkelsestid og utmerket datasikkerhet. Per nå er ikke protokollene godkjent ennå, men de mest sannsynlige alternativene er Wi-Fi® 5-basert, dedikert kortdistansekommunikasjon (DSRC) som IEEE 802.11p eller cellular vehicle-to-everything (C-V2X) ved bruk av 5G mobilnettverket. Selv om begge protokollene bruker 5,9 GHz-spekteret, er det ingen muligheter for datautveksling.
I mangel på klarhet har noen kjøretøyprodusenter tatt et ensidig valg, mens halvlederleverandører, som gjenspeiler den lange utviklingstiden, har sikret seg ved å utvikle brikkesett for begge protokollene. Per i dag er DSRC et populært valg ettersom C-V2X sin avhengighet av 5G for å bli fullstendig tatt i bruk fører til risiko for forsinkelser.
Sammenligner man de to, ser DSRC best ut fra et teknisk perspektiv med en rekkevidde på 300 m, høyhastighets dataoverføring, og 5 ms forsinkelse. Systemet er tatt i bruk i flere land inkludert Japan, Østerrike og Tyskland. Det ble tatt i bruk i USA, men på grunn av bekymringer for sikkerhet gikk de senere over til C-V2X.
Den største fordelen med C-V2X er at det vil ta i bruk 5G-nettet, noe som fører til en stor nedgang i kostnader gir en stor nedgang i kostnader og drar nytte av fremtidig utvikling ved hastigheter opptil 10 GBit/s. Det vil også være mulighet å sikre at V2X-data blir prioritert for å sikre lav forsinkelse. De største bekymringene er timingen av 5G-nettets ferdigutvikling og kvaliteten på dekningen på landet.
Beslutninger og ansvar
Selv om det er mange fordeler med helt autonome kjøretøy, er det etiske og moralske dilemmaer som må tas opp av forbrukere, lovgivere, forsikringsselskaper og kjøretøyprodusenter. Selv under testfasen har det skjedd flere dødsulykker med selvkjørende kjøretøy der sansealgoritmene ikke har gjenkjent en forestående ulykke eller oppdaget et annet kjøretøy i nærheten.
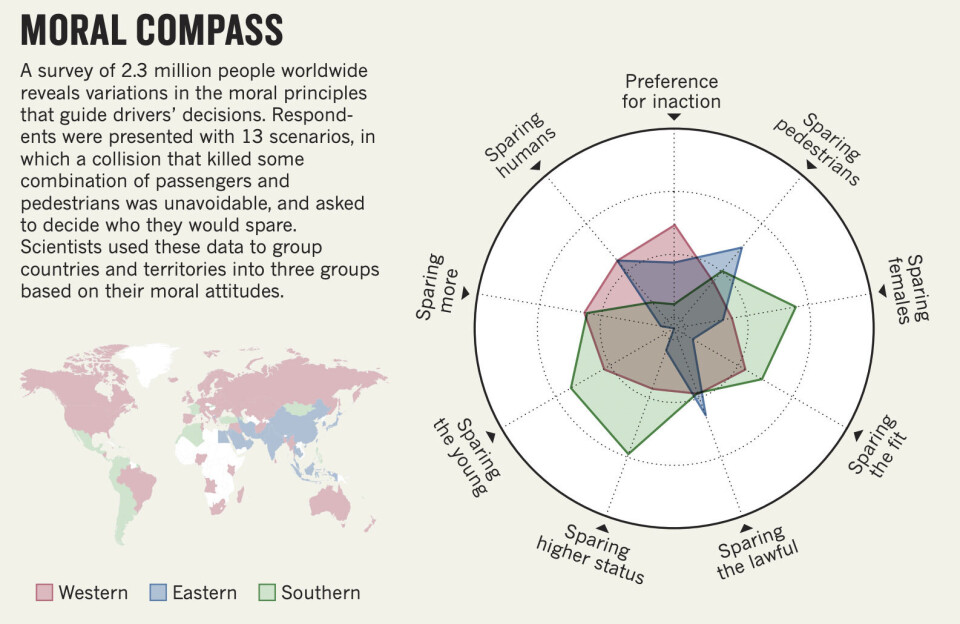
Som mennesker tar vi avgjørelser i sekundene rett før en ulykke – for eksempel ved å styre bilen i den retningen som skader færrest – en beslutning tatt i et øyeblikk basert på instinkt, uten tid til å analysere situasjonen i dybden. Når kjøretøyene er helt autonome, vil disse valgene tas av kjøretøyet basert på en algoritme som må utvikles. Dette skaper et juridisk minefelt som blir mer komplekst ettersom holdninger til hvilke handlinger mennesker kan ta også varierer fra område til område, som nevnt i en artikkel i Nature journal (Figur 5).
Med helt autonome kjøretøy på SAE nivå 4 og nivå 5, finnes det ikke noen handling eller metode for å gripe inn i kjøretøyets atferd. Ulykkene kan derfor ikke skyldes noen i kjøretøyet. Ansvaret må ligge hos kjøretøyprodusenten, utvikleren av algoritmene, sensorprodusentene eller en menneskelig sjåfør i et annet kjøretøy. På nivå 3 er det mindre klart hvem som har skylden ettersom sjåføren kan ha hatt utilstrekkelig tid til å reagere, eller ikke hatt en mulighet for å unngå ulykken som det autonome systemet hadde satt i gang. I disse tilfellene vil datalogger fra kjøretøyets svarte boks (som er påbudt i California) være uvurderlige når det gjelder ansvarsfordeling.
Sammendrag
Det er lite tvil om at autonome kjøretøy er en del av fremtiden, til tross for de mange utfordringene som må overvinnes for å gjøre visjonen til virkelighet. På noen måter er de tekniske utfordringene bare mindre hinder, og vi er godt i gang med å løse dem. De etiske eller moralske valgene som må tas og implementeres i algoritmer kan imidlertid skape kontroverser i en tid fremover.
Det er uten tvil en betydelig motivasjon for å fortsette reisen mot selvkjørende kjøretøy, da de uten tvil vil gjøre veiene tryggere, samt bidra til å kutte køer og redusere forurensning.





























